Index
FORobotics – Mobile, ad-hoc kooperierende Roboterteams
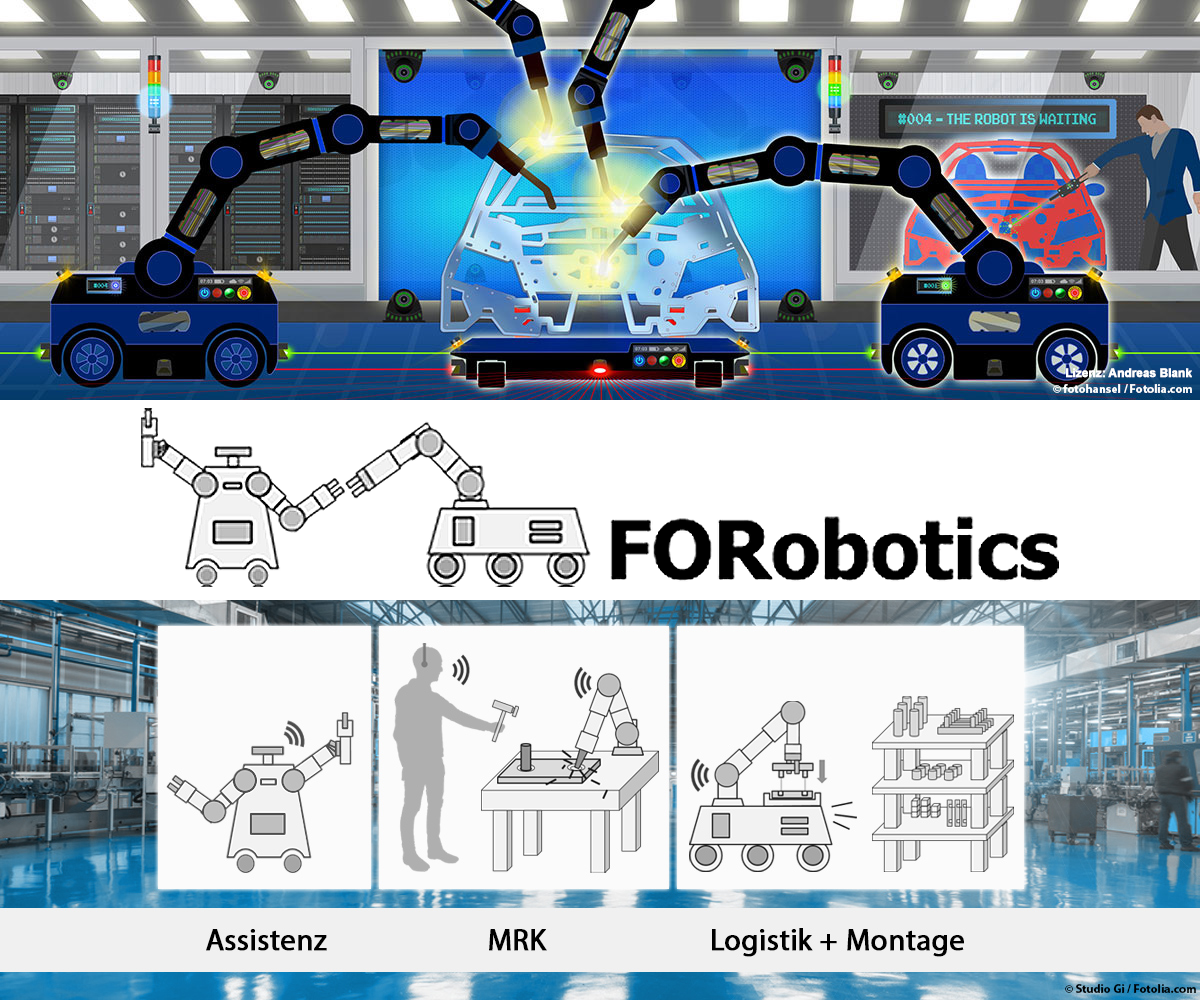
By combining human-robot cooperation and location-flexible robot systems, a new form of team can be defined within the factory in order to solve a production-related task together through the complementary combination of skills. This opens up new potentials for production and assembly. Particularly relevant here are aspects such as assistance with manual activities, human-robot and robot-robot collaboration.
In addition to the use of integrated data models in all phases of use, intelligent production planning and control optimized for mobile robot systems, successful team collaboration requires flexible and powerful ad-hoc networking, the most comprehensive possible environment detection and interpretation, and motion planning tailored to the respective team constellation and task. In addition, user acceptance of mobile robot systems in production and, in particular, the intuitiveness of human-robot interaction play a decisive role in the future successful establishment of such systems in the production environment. These and other scientific questions are addressed within the framework of the joint research project FORobotics of the Bavarian Research Foundation.
Eight research and 19 industrial partners are involved in the research network over a period of three years. On the research side, the addressed topics are focused by partners from the University of Augsburg, the University of Bayreuth, the Friedrich-Alexander-University Erlangen-Nuremberg, the Technical University Munich, the University of the German Federal Armed Forces Munich and the Fraunhofer Institute IGCV from Augsburg.
Duration: Q1/2017 – Q4/2019
Sponsor: Bavarian Research Foundation
Website: www.forobotics.de
Flexible Automation of COVID-19 Analysis
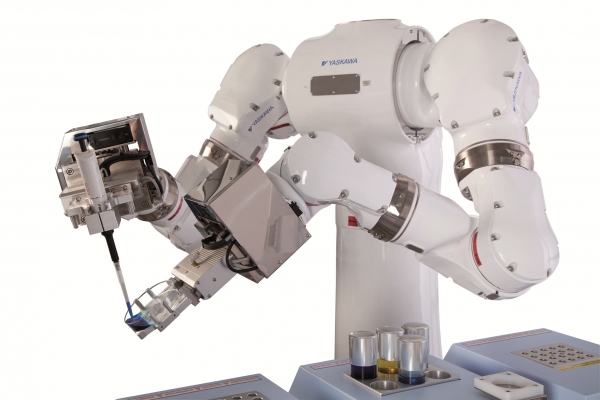
The comprehensive diagnosis of infections is crucial in pandemics in general and in the COVID-19 pandemic in particular, in order to contain the outbreak. A decisive contribution to better recording of COVID-19 infections is therefore the increased use of diagnostic tests. The medical gold standard for the diagnosis of a viral infection is the polymerase chain reaction (PCR), in which samples are tested for corresponding gene sequences of the virus. The smear of the posterior pharyngeal wall is transported in a sealed tube to a suitable laboratory and prepared for analysis by laboratory staff under sterile conditions. Finally, the PCR is usually performed automatically.
However, since sample preparation involves considerable personnel effort, it represents a bottleneck in the entire process and also carries the risk of infection for the personnel. Within the research project FlexACO the steps of pre- and post-analysis shall be taken over by a robot system. The robot will be integrated into the existing diagnostic process both in terms of hardware and software. The automation system will be designed as flexible and modular as possible in order to be used in different semi-automated processes of medical laboratories. Thus the system is not only useful in the current acute case of the COVID-19 pandemic.
Development of an artificial iris implant based on dielectric elastomeric actuators (ADAI)
The iris not only gives our eye its color and thus our personal appearance, but above all plays an important role in the optical system of the eye. Aniridia (absence of the iris) therefore not only reduces the optical quality by photophobia, aberration errors, glare effects and the loss of depth of field, but also has an aesthetic effect on the eye. An appropriate medical technology system must be developed for the described indications to replace the iris with an implant. The primary function is the controlled iris opening depending on the external lighting situation with muscle functions based on dielectric elastomers as artificial muscles.
Functional iris implants would have the decisive advantage of being able to regulate the incident light intensity and thus restore part of the user’s normal vision. Previous silicone implants have a purely aesthetic aspect and are fixed to a certain light intensity.
The development goal of the research project is a demonstrator of an artificial iris based on Dielectric Elastomer Actuators (DEA) as a starting point for the development of an active implant.
Cost-oriented synthesis of different sensor systems for safe use of driverless tow trucks in indoor and outdoor operation with mixed traffic

Situation:
Sustainable means of transport need to meet the requirements of innovative production concepts as well as physical restrictions in their field of use. Following the change towards buyer markets, modern production is characterized by universality, scalability, modularity, mobility and compatibility. A constant and secure supply of materials is dependent on a transport system with the same characteristics. Following the goals of German government`s sustainability strategy, companies are more than ever forced to take existing layouts into account. Since these brownfield approaches often do not have optimized material flows, sustainable means of transport must be able to adapt to difficult environments.
Need for action:
Automated guided vehicles systems (AGVs) implement versatile logistics systems for the provision of materials. At present, there a not yet standardized solutions available to provide a universal and robust localization and navigation in a mixed indoor and outdoor environment. For transport tasks in isolated indoor scenarios, a large variety of AGVs exist. However, these cannot be used for intermediate transport in-between buildings. Existing solutions for outdoor scenarios on the other hand do not meet the requirements of indoor operation.
Project objective:
The project researches a cost-efficient solution for localization and navigation of AGVs that enables intralogistics transports independent of ambient conditions. Based on an in-depth analysis of solutions of environmental perception utilizing cost-efficient sensors, a suitable solution for the use of AGVs in a mixed indoor and outdoor environment is found. Together with project partners, the result will be implemented, tested and validated using a reference AGV.
Benefits
- Expansion of use cases for AGVs
- Contribution to the realization of a self-managing intralogistics system
- Lean and cost-efficient material-flow solutions based on widely known technologies
AK|HEP – Development of an integrated automation concept for the High Energy Photonic Center
Within the scope of the cooperation project with Siemens Healthineers, integrated automation concepts and flexible production structures are being developed for the production of X-ray emitters and generators for medical imaging.
When planning new production plants, the required targets regarding the efficiency of the processes and the quality of the products must be taken into account. Future-oriented production and logistics systems are characterized by modularity, flexibility and adaptability. In addition, economic aspects have to be considered while planning new production plants and developing optimized production structures and processes. A holistic automation concept is developed including the coordination of all relevant subsystems such as the equipment, means of transport and IT systems. The concept is characterized by a flexible, material flow optimized production structure, networked manufacturing stations and automated material and information transport. During concept development, methods are developed for the identification, evaluation and implementation of automation projects, planning of the production organization and control of the intralogistic material and information transport.
AIRKom – Application of autonomous UAVs for fully automated material handling in intralogistics

Funded by the Forschungsgemeinschaft Intralogistik / Fördertechnik und Logistiksysteme (IFL) e.V. the Institute for Factory Automation and Production Systems (FAPS) researches the application of autonomous UAVs (unmanned aerial vehicle) for intralogistics, particularly the fully autonomous supply of picking stations directly from storage areas.
Similar to the supply in outdoor scenarios, autonomous UAVs for indoor environments also feature a three-dimensional motion capability resulting in shorter supply routes, higher supply speeds and more flexible possibilities of application compared to autonomous ground vehicles. By expanding intralogistics with the third dimension, space, which has not been used up to now, can be integrated in the material flow as well. By this, the floor area needed for supply can be reduced and the productivity per area can be increased.
To prepare the way for the application of autonomous UAVs in intralogistics and to enhance the necessary technologies, the research in AIRKom is focused on the following topics:
- Precise and reliable indoor navigation with subcentimetre flight and localization accuracy
- Three-dimensional path planning and sensor based collision avoidance
- Fully automated handling of standardized load carriers by the UAV
- Safety and fail-safe flight control technology
Development of a robot platform to support new interaction strategies in children with limited socio-emotional abilities
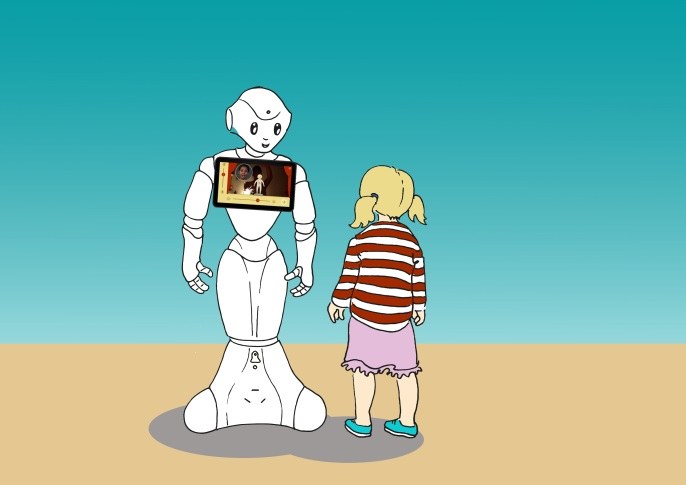
The understanding and expression of socio-emotional signals, such as facial expression and voice modulation, is impaired in children with autism. While human interaction partners are difficult for them to assess, these children perceive robots as more predictable and less complex. They are also often technically interested and open-minded.
To develop the socio-emotional communication skills of autistic children, a new form of therapy using a robotic system is being developed and tested in the ERIK project. The robot “Pepper” records facial expressions and speech in the interaction with the child. By playing with the robot ball “Leka”, the pulse can also be determined via electrodes. “Pepper” interprets these signals and derives emotions in real time. Combined with the therapy app “Zircus Empathico”, emotional and social skills relevant to everyday life can be trained. The therapy scenarios can be individually adapted by recognising the child’s interest, frustration and boredom. By means of gestures and eye movements, “Pepper” can interact with children in a lifelike way, reducing anxiety when dealing with people.
The innovative therapy approach allows therapists to observe and evaluate interactions more precisely, as they are no longer part of the interaction themselves. Emotionally sensitive robotics can also interact with groups of children for the first time.
KUrS – Mechatronic intraurethral sphincter for incontinece therapy

In Germany, over six million people are suffering with symptoms of urinary incontinence and over a 120 million Euro were spent for absorbent product in a year. For patients, urinary incontinence is not only a physical health problem but also causes mental stress and can significantly impair the quality of life. Especially with regard to the demographic change, the dysfunction of the lower urinary tract is being a bigger medical and socioeconomic issue than ever.
Prevailing incontinence treatment such as pelvic floor exercises and electric stimulation do not always fully cure urinary continence. Invasive methods, such as implantation of pelvic mesh, slings, or cuff-based artificial sphincters are often associated with high risks and complications e.g. urethral erosion.
In our research project funded by Bavarian ministry of economic affairs, energy and technology, we are developing a miniaturized mechatronic device that can be placed in the urethra of insentience patients with the minimized risk. The intelligent implant are designed to substitute insufficient function of the urinary sphincter to help the patients gain back full control over the bladder and thus enhance their quality of life.
Energy-efficient coordination and optimized order allocation to a fleet of versatile and autonomous, intralogistic transport vehicles

In the previous E|Flow project, energy-efficient, versatile and autonomous transport vehicles for internal material flow were researched and developed. The research results were directly incorporated into the AutoBod development project at the industrial project partner.
Based on the work of E|Flow, the project E|Flow II focuses not only on the development of a vehicle-based state machine and an order allocation mechanism but also on the development of control strategies for the implementation of autonomous swarm behaviour of a large robot fleet. The central control approaches are compared with the decentralized control logic. Decentralized communication and order negotiation between the individual transport entities extends the functional use of autonomous transport robots from predefined point-to-point deliveries to a self-regulating material flow system that reacts to external influences.
The E|Flow II project aims to develop innovative cooperative, self-controlling autonomous robot fleets for internal material supply. Such fleets of transport vehicles will significantly increase the energy efficiency of future production systems. Energy-efficient production represents a decisive competitive advantage for the future. On the one hand in order to be able to produce cost-efficiently and thus sustainably competitively, and on the other hand in order to be perceived on the market as an innovative and resource-conserving company in the long term.
Intrafly – Autonomous UAVs in intralogistics

Nowadays many industry sectors have to deal with the increasing trend towards individualised and costumer specific products. The costumers expect configurable products that concur with their desires and demands. The associated production processes hence change from the mass production of just a few distinct products to low quantities and a wide variety of different products. Due to the high amount of investment costs and the required level of automation, commonly used logistic system are not profitable for this kind of production and alternatives are required.
In this context, autonomous unmanned aerial vehicles (UAVs) can be an alternative to existing logistics systems and driverless transport systems. They are able to operate in the currently unused space above the production systems, thus extend the flow of materials by the third dimension. Furthermore, a transportation system based on UAVs is highly flexible and allows fast transportation.
Therefore, the intention of the research project is the development of existing UAVs and corresponding technologies to use them in industrial applications. By combining different sensor technologies, indoor positioning systems and innovative software algorithms an autonomous navigating UAV shall be created and evaluated within the scope of two industrial use cases.
Besides the in-house transportation, the research regarding the application possibilities of UAVs also focuses on advanced tasks like maintenance and the surveillance of manufacturing facilities.
Simultaneously to the development of the UAV, its hazard potential is analysed and evaluated. By the use of appropriate safety technology and precautions, a compliance with industrial safety directives and legal regulations shall be archived.