Index
AutoTron – Increasing the Efficiency and Expanding the Application Range of Robotic Neutron Diffraction
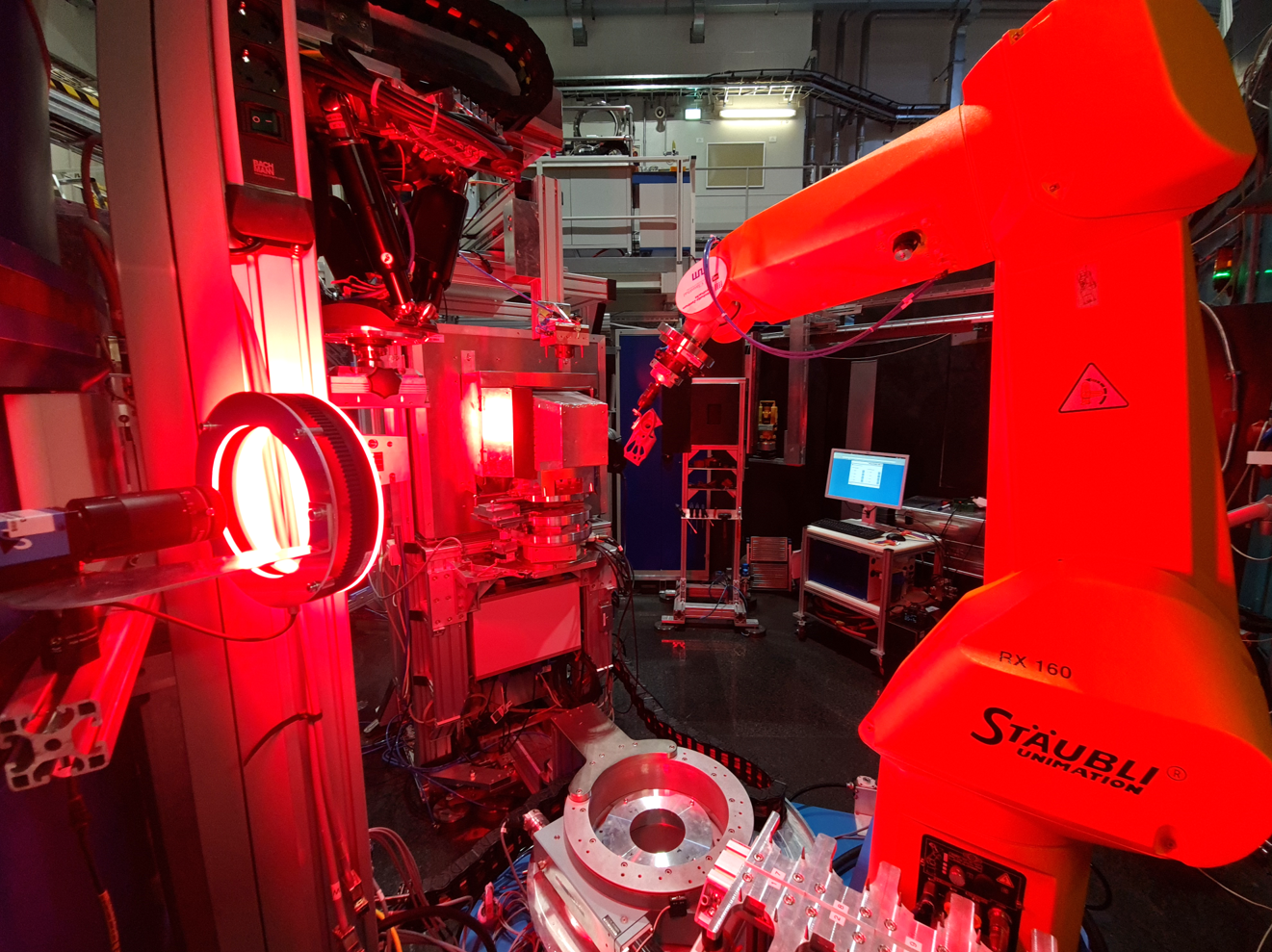
The aim of the research project AutoTron funded by the BMBF and conducted together with the Heinz Maier-Leibnitz Center of the Technical University of Munich is to increase the efficiency and expand the range of applications of robot-assisted sample positioning in neutron diffraction. The robotic system developed in the predecessor project RAPtOr with an absolute positioning accuracy of less than 50 μm is now able to handle most scientific cases at STRESS-SPEC and opens up new measurement possibilities.
In the follow-up AutoTron project, this newfound flexibility will be further extended and the higher level of automation will be used to reduce the time and effort required for instrument calibration and sample setup by 20%. This will further expand the measurement capabilities while significantly improving the efficiency and usability of the STRESS-SPEC thermal neutron diffractometer at MLZ in Garching.
In addition, it will be possible to position the increasingly complex sample geometries (e.g. additively manufactured components) in a less error-prone manner using established assistance systems. These systems simplify and accelerate the tasks of scientists in sample preparation, alignment and definition of measurement locations during an experiment and enable new measurement options, such as the complete evaluation of the stress tensor for complex sample shapes.
Automatic Monitoring of Construction Progress through the Application of Artificial Intelligence and Robotics

Funded by the Bundesministerium für Wirtschaft und Klimaschutz (BMWK), the research project “Automatic Monitoring of Construction Progress through the Application of Artificial Intelligence and Robotics” (BauKIRo) is investigating a solution for the automated recording of construction progress by an autonomous flying robot and the evaluation of the recorded actual data (as-built model) via an automated comparison with the planning data (as-planned model). The research project is carried out by the FAPS institute in close cooperation with the University of Applied Sciences Schmalkalden (Prof. Dr.-Ing. M. Schweigel).
The project, which is funded within the industrial community research program of the AiF, has started retroactively to 01.05.2022. For the demonstrative implementation of the automated recording of the construction progress by an autonomous flying robot, the FAPS institute will first design and build a mobile sensor system, equipped with optical sensors for environmental perception and localization of the system, to record the actual state of the construction site. Subsequently, the sensor system will be integrated into a flying robot. In the further course of the project, a solution for collision-free navigation for systematic recording of the actual state of the construction site will be developed. The focus will be on interior areas. For this purpose, a SLAM algorithm will be designed which, based on semantic features (e.g. doors, windows, pipes, etc.) and BIM data, enables the navigation and recording of the constantly changing construction site by the flying robot. The overall system is to be validated on real construction sites. The automated comparison of the recorded data with planning data will be researched by the Schmalkalden University of Applied Sciences.
TAQO-PAM – Tailored Application of Quantum Optimisation for Planning and Control of Assembly and Manufacturing
The TAQO-PAM project addresses the real-time optimization of production and intralogistics, in particular of modern matrix manufacturing facilities, using hybrid quantum-classical algorithms adapted to customized medium-term NISQ hardware. This is done by holistically integrating problem-specific adapted quantum processing units (QPUs) into existing scenarios and by extending existing factory automation and production planning methods.
The development of systems that can be integrated into existing technologies at the operational level allows QPUs to be used in latency- and determinism-dependent scenarios. The focus on local data processing avoids the need to share sensitive production runtime knowledge and data with third parties. Based on the assumption that suitable custom QPUs will be available in the medium term, the project explores quantum algorithms for optimizing manufacturing tasks, considers the integration of quantum computing into industrial processes, and makes the technology usable for users without deep quantum mechanical and quantum computing knowledge. By systematically transferring real problems from industry, the advantages of quantum algorithms are to be combined with advantages of classical algorithms and thus industrially usable use cases are to be successfully solved.
VIRERO – VIrtual REmote RObotics for Radiometric Sorting

Subproject: Immersive and Self-Optimizing Teleoperation System and Autonomous Robot Capabilities (15S9422C)
Within the project, robots and radiological measurement technologies will be developed to handle radioactive waste materials teleoperational as well as semi-autonomous. The goal of the technology development reaches from the disassemble and sorting of nuclear waste, with a high dose rate like filter cartridges and filter bags, over the post conditioning of packed radioactive wastes, up to a radiological sorting for an optimized approval procedure. Conventional Systems exhibit a lower flexibility due to an adaption to different operating conditions. The breaking up and cutting of packed waste materials as well as the high individual characteristics of waste parts are a challenge for these kinds of systems. The usage of industrial robots, innovative sensors in the field of robotic and nuclear engineering as well as an immersive, self-optimizing teleoperation technique has the potential to solve this challenge.
The aim of the project is the development of an adaptive teleoperation which fulfils the requirement for working in a nuclear environment. Necessary thereby are the development and fusion of a radiological and spatial characterization. Autonomous, self-optimizing systems capabilities help to reduce the tasks performed by Operators successively. The occupational safety will be improved on this way because the staff is not exposed to radiation during the handling and sorting of nuclear waste. An immersive and self-optimizing teleoperation system, the spatial characterization of high individual waste parts as well as autonomous, self-optimizing robotic skills for handling and sorting the waste, are in the research focus of the Institute for Factory Automation and Production Systems (FAPS).
The project is funded by the Federal Ministry of Education and Research (BMBF) within FORKA (Research for the decommissioning of nuclear facilities).
RAPtOr – Automated sample positioning in neutron diffractometry
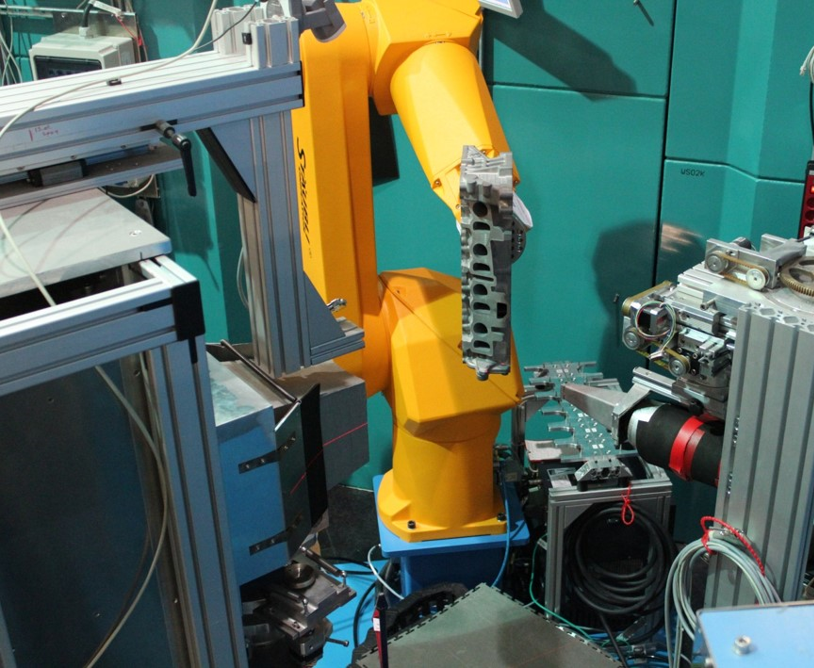
The goal of this research project in neutron diffractometry is the realization of the automated sample positioning in the focus point of the neutron source with a classical 6-axis industrial robot. To achieve the necessary absolute accuracy of 50 μm, a measuring and control system is developed, that enables a high-precision position measurement of the sample, which is mounted to the robot, in the complete workspace, to compensate deviations from the target position. Additionally, within the framework of this project, the automated generation of a measuring program based on the sample geometry is explored and developed. In addition, a collision avoidance system is integrated for the robot.
Compared to the state of the art, the aimed results of this project allow a substitution of the currently deployed expensive special kinematics, a higher degree of freedom of the sample positioning and the automatic generation and execution of measurement programs.